معرفی ربات پارک نوری
ربات پارک نوری یکی دیگر از محصولات آکادمی نخبگان خلاق جوان می باشد که در
راستای آموزش رباتیک و الکترونیک عرضه میگردد.
این ربات که تشکیل شده از فیبر مدار چاپی ، مقاومت ها ، خازن ، LED ، سیم دوپین ،
IC و سوکت IC میباشد ؛ امکان شناخت بهتر قطعات ، یادگیری شماتیک های الکتریکی ،
ابزار الکتریکی ، تقویت مهارت لحیم کاری و … را به دانش آموزان می دهد.
نحوه کارکرد ربات پارک نوری به صورتی میباشد که با اتصال باتری به ربات ، ربات نور را
دنبال کرده و به طرف آن می رود.
لیست قطعات ربات پارک نوری
| نام قطعات | تعداد قطعات |
| مقاومت صفر اهم | 3عدد |
| مقاومت100Ω | 2عدد |
| مقاومت 150Ω | 1عدد |
| مقاومت 1KΩ | 1عدد |
| مقاومت 10KΩ | 4عدد |
| مقاومت 22KΩ | 2عدد |
| مولتی ترن 103 | 1عدد |
| پتانسیومتر E22 | 1عدد |
| ولوم10K | 1عدد |
| دیود 4007 | 2عدد |
| LED قرمز5m | 5عدد |
| خازن عدسی 104 | 2عدد |
| خازن الکترولیتی 100µF/16V | 1عدد |
| سیم دو پین | 3عدد |
| ترانزیستور | 2عدد |
| فتوسل | 2عدد |
| پین دوتایی | 3عدد |
| سوکت 18IC پایه | 1عدد |
| سوکت 8IC پایه | 1عدد |
نحوه ساخت ربات پارک نوری
توجه : برای این که قطعات را به صورت صحیح در مدار جای گذاری کرده و آن را
درست لحیم کاری کنید باید بعد از جای گذاری یک دسته مشخص از لوازم روی مدار و
تعیین کردن جای آن ها ، شروع به لحیم کاری کنید. برای مثال اول مقاومت ها را جایگذاری
میکنیم ، پس از اتمام جای گذاری مقاومت ها را لحیم میکنیم و پایه های اضافی را با سیم
چین یا ناخن گیر قطع میکنیم سپس به سراغ جای گذاری دسته بعدی میرویم و تا آخر به
همین صورت پیش خواهیم رفت.
1( ابتدا 3 عدد مقاومت صفر اهم را در 3D ، 4D ، 5D و دو جامپر در شماتیک مخصوص آن
مطابق شکل زیر در جایگاه قرار داده و پس از اطمینان از درستی لحیم میکنیم.
2( حالا باید مقاومت Ω 100 را در 8R و 7R ، مقاومت Ω 150 را در خانه مستطیلی شکل
پایین مولتی ترن ، مقاومت KΩ 1 را در 9R ، مقاومت KΩ 10 را در 1R و 2R و 4R و 5R
، مقاومت KΩ 22 را در 6R و 3R روی فیبر مدار چاپی جای گذاری میکنیم و پس از این
مقاومت صفر اهم که از درست بودن جای قطعه مطمئن شدیم آن ها را لحیم میکنیم و پایه های اضافی را با
سیم چین یا ناخن گیر قطع میکنیم. )
3( پس از مقاومت ها نوبت به مقاومت های متغیر مولتی ترن و ولوم و پتانسیومتر میرسد
به طوری که مولتی ترن 103 در جایگاه نمایش داده شده به صورتی قرار می گیرد که پیچ
آن به سمت راست و پایین باشد.)
برای نصب ولوم باید توجه داشته باشیم که در قسمت چپ و پایین برد یک مستطیل با شش
سوراخ خالی وجود دارد ؛ ولوم باید به صورتی روی آن نصب شود که پیچ آن به سمت بیرون
برد باشد .
برای نصب پتانسیومتر که سه پایه دارد باید آن را به صورتی در جایگاه مشخص شده قراردهیم
که طرف صاف آن به سمت خازن الکترولیتی باشد و پس از اطمینان از درستی جایگاه ، آن
را لحیم میکنیم.
4( حالا می توانیم دیود های 4007 را پس از تشخیص قطب + و – ، در 1D و 2D قرار داده
و پس از اطمینان از درستی جایگاه ، آن ها را لحیم کنیم.)
– روش تشخیص قطب های دیود :
.1 قطعه دیود پایه منفی اش در سمت نوار نقره ای قرار دارد .
5( پس از لحیم دیود ها نوبت به دیود نوری قرمز LED میرسد ؛ پس از تشخیص قطب +
و – ، LED ها را در 1LED ، 2LED ، 3LED ، 4LED ، 5LED قرارداده و پس از ایجاد
اطمینان از درستی جایگاه ، لحیم می کنیم. )
– روش های تشخیص قطب های LED :
.1 پایه مثبت بلند و پایه منفی کوتاه میباشد.
.02 بدنه LED در پایه منفی دارای شکستگی میباشد.
.3 در داخل LED پایه منفی همانند چکش و پایه مثبت همانند میخ میباشد.
6( نوبت به خازن های عدسی 104 میرسد ، خازن های عدسی دارای قطب مثبت و منفی
نیستند ؛ آن ها را در جایگاه خود بین ترانزیستور و پین دوتایی قرار میدهیم و پس از حاصل
کردن اطمینان از درست بودن جایگاه ، آن ها را لحیم خواهیم کرد .)
7( نوبت به خازن الکترولیتی میرسد ، در این ربات ما 1 خازن µF/100ѵ16 داریم ، پس از
مشخص کردن قطب + و – ، خازن الکترولیتی را در 3C قرار داده به صورتی که مثبت آن به
سمت ولوم باشد و پس از اطمینان از درست بودن جایگاه ، آن را لحیم خواهیم کرد و نهایتا
با قطع کردن پایه های اضافه به این مرحله نیز خاتمه میدهیم. ) جایگاه آن ها به صورت زیر
میباشد.)
– روش تشخیص قطب های خازن الکترولیتی :
.1 پایه بلند مثبت و پایه کوتاه منفی است.
.2 در سمتی که قطب منفی قراردارد ، نوار نقره ای رنگ وجود دارد .
8( حالا نوبت به نصب سوکت های IC میرسد ، در این ربات ما یک IC هشت پایه و یک IC
هجده پایه داریم و هر دو را در جایگاه های مشخص شده قرارداده و همه پایه های آن ها را
یک به یک لحیم میکنیم. لطفا به جایگاه بالا و پایین IC توجه کنید نیم دایره ای که در بالای
سوکت IC میباشد بسیار حائز اهمیت است. )
9( حالا میتوانیم ترانزیستور ها را در 2Q به صورتی که هدسینگ آن به سمت بیرون و در
1Q به صورتی که هدسینگ آن به سمت داخل برد باشد جای گذاری کرده و پس از اطمینان
از درستی جایگاه ، آن را لحیم میکنیم.)
10( پس از ترانزیستور ها باید فتوسل ها را در 1F ، 2F قرار دهیم و پس از اطمینان از درستی
جایگاه آن ها را لحیم کرده و پایه های اضافی را قطع کنیم. )
11( پین هدر ها را جای گذاری و لحیم می کنیم ، سپس در جایگاه BAT ، 1C و 2C سیم
دو پین ها را جای گذاری می کنیم.)
12( در این مرحله IC ها را روی سوکت IC با توجه به نیمدایره موجود در باالای سوکت IC
جای گذاری میکنیم.)
13( اگر در پک جا باتری 4 تایی وجود داشت ، سیم قرمز سیم دو پین را به سر سیم قرمز
جا باتری متصل کنید و سیم مشکی سیم دو پین را نیز به سیم مشکی جا باتری وصل کنید
و دور آن را با چسب برق یا وارنیش بپوشانید. برق جا باتری ابتدا به میکروسوییچ ها متصل
می شود سپس در برد سمت راست شکل بالا به BAT و در نهایت در برد سمت چپ به BAT
وصل می شود.
و در صورت عدم وجود جا باتری 4 تایی در پک ، سیم دو پین ها باید به صورت زیر متصل
شوند)
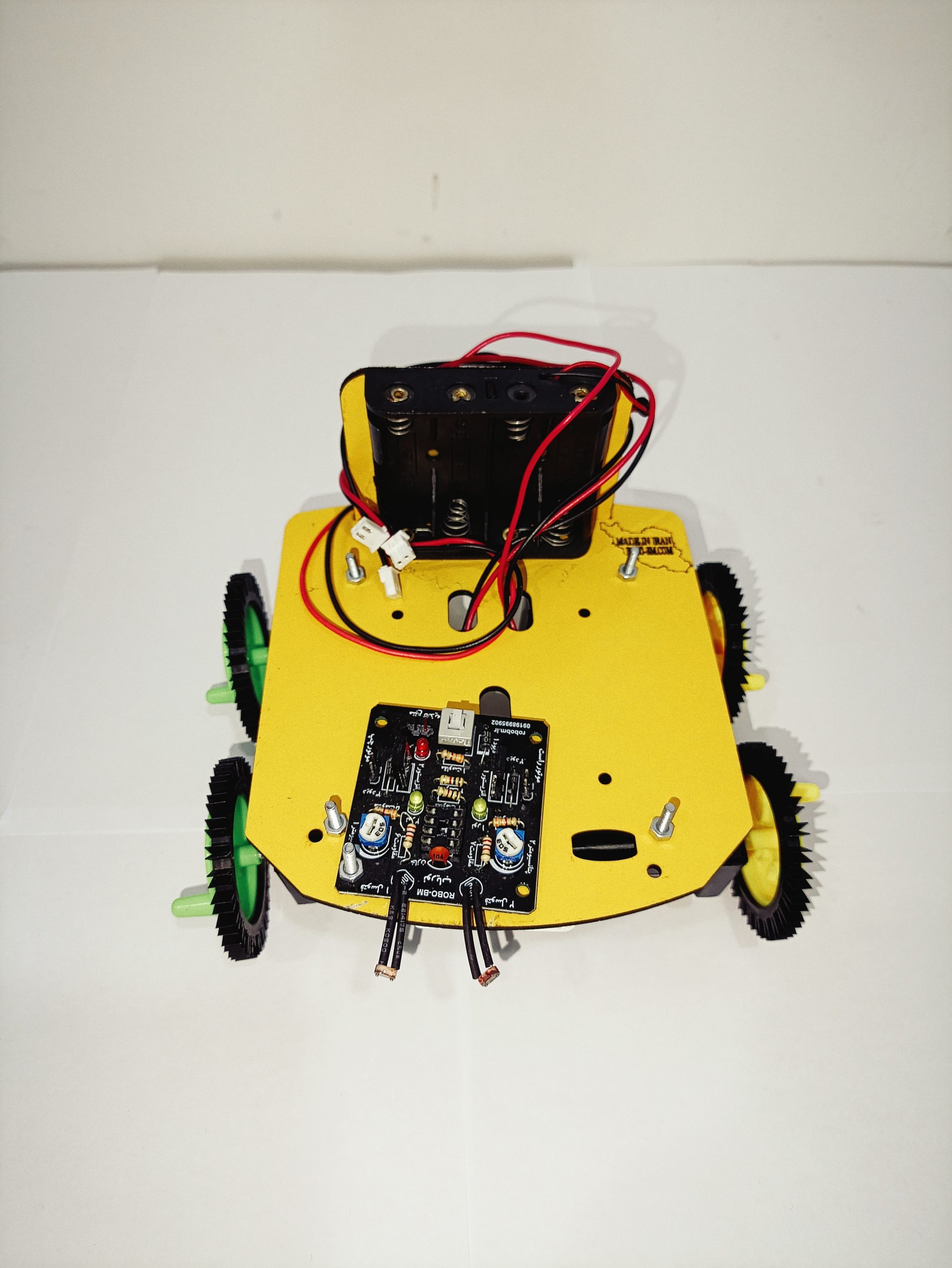
نصب شاسی ربات پارک نوری
از قسمت پشت گیربکس پیچ ها بسته می شوند و به قسمت بیرونی جای پیچ ها در شاسی
مطابق شکل زیر متصل می شود.
نکته : قسمتی از شاسی که دارای آرم کانون نخبگان خالق جوان می باشد باید بالای
گیربکس ها قرار گیرد.


بدون دیدگاه